Control CartRacing-v2 environment using DQN from scratch
Contents
Control CartRacing-v2 environment using DQN from scratch#
In this tutorial, we will implement DQN algorithm for controllong CartRacing-v2 environment, which has the image observation space. We will focus more on how to convert a given raw environment into MDP environment, and we assume that the readers already have known DQN algorithm.
import numpy as np
import gymnasium as gym
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.nn.functional as F
CarRacing-v2 environment#
Let’s first take a look at CarRacing-v2 envrionment.
Since DQN can be applied to environments with discrete action spaces, we need to pass continuous=False.
You can find more information about the environment here.
env = gym.make('CarRacing-v2', continuous=False)
print("Observation space: ", env.observation_space)
print("Action space: ", env.action_space)
Observation space: Box(0, 255, (96, 96, 3), uint8)
Action space: Discrete(5)
Let’s see the initial state.
s, info = env.reset()
print(s.shape)
plt.figure(figsize=(5, 5))
plt.imshow(s)
plt.axis('off')
plt.show()
(96, 96, 3)
It looks weird… It is not what we saw… What’s going on here?
Let me do nothing (no_op action) for the next 50 steps.
(You don’t need to write the following code)
import matplotlib
from IPython.display import HTML
frames = []
for i in range(50):
s, r, terminated, truncated, info = env.step(0) # 0-th action is no_op action
frames.append(s)
# Create animation
fig = plt.figure(figsize=(5, 5))
plt.axis('off')
im = plt.imshow(frames[0])
def animate(i):
im.set_array(frames[i])
return im,
anim = matplotlib.animation.FuncAnimation(fig, animate, frames=len(frames))
HTML(anim.to_jshtml())
We just saw that the game screen gradually zooms in for the first 50 steps. Of course, you can move the car during this zoom-in phase, but this zoom-in phase is a very small part of the overall game, which may hinder our agent from learning to control the car. Thus, we will not use the first 50 steps of the game.
The second thing we have to know is that we are given only one current game frame for each step. This observation setting cannot satisfy the Markov property. We cannot guess if the car is moving forward or backward from only one frame, which means we cannot predict the next frame for given the current frame. Thus, we need to stack the previous \(k=4\) frames.
Let’s read together some part of DQN paper.
The raw frames are preprocessed by first converting their RGB representation to gray-scale
…
The final input representation is obtained by cropping an 84 × 84 region of the image that roughly captures the playing area.
…
For the experiments in this paper, the function \(\phi\) from algorithm 1 applies this preprocessing to the last 4 frames of a history and stacks them to produce the input to the Q-function.
…
we also use a simple frame-skipping technique [3]. More precisely, the agent sees and selects actions on every kth frame instead of every frame, and its last action is repeated on skipped frames.
From now on, we convert CarRacing-v2 environment into the form above. Let’s first define a function for preprocessing each game frame.
We can use any method to resize frames into 84 X 84 ones. The easiest way is to rescale frames. But, here we utilize our knowledge about the game. Every frame always contains a black area at the bottom of the frame, so we had better cut this black area.
import cv2
def preprocess(img):
img = img[:84, 6:90] # CarRacing-v2-specific cropping
# img = cv2.resize(img, dsize=(84, 84)) # or you can simply use rescaling
img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) / 255.0
return img
Now, we will change initial setting (reset method below) and observations (step method below).
class ImageEnv(gym.Wrapper):
def __init__(
self,
env,
skip_frames=4,
stack_frames=4,
initial_no_op=50,
**kwargs
):
super(ImageEnv, self).__init__(env, **kwargs)
self.initial_no_op = initial_no_op
self.skip_frames = skip_frames
self.stack_frames = stack_frames
def reset(self):
# Reset the original environment.
s, info = self.env.reset()
# Do nothing for the next `self.initial_no_op` steps
for i in range(self.initial_no_op):
s, r, terminated, truncated, info = self.env.step(0)
# Convert a frame to 84 X 84 gray scale one
s = preprocess(s)
# The initial observation is simply a copy of the frame `s`
self.stacked_state = np.tile(s, (self.stack_frames, 1, 1)) # [4, 84, 84]
return self.stacked_state, info
def step(self, action):
# We take an action for self.skip_frames steps
reward = 0
for _ in range(self.skip_frames):
s, r, terminated, truncated, info = self.env.step(action)
reward += r
if terminated or truncated:
break
# Convert a frame to 84 X 84 gray scale one
s = preprocess(s)
# Push the current frame `s` at the end of self.stacked_state
self.stacked_state = np.concatenate((self.stacked_state[1:], s[np.newaxis]), axis=0)
return self.stacked_state, reward, terminated, truncated, info
We can create our desired environment as follows:
env = gym.make('CarRacing-v2', continuous=False)
env = ImageEnv(env)
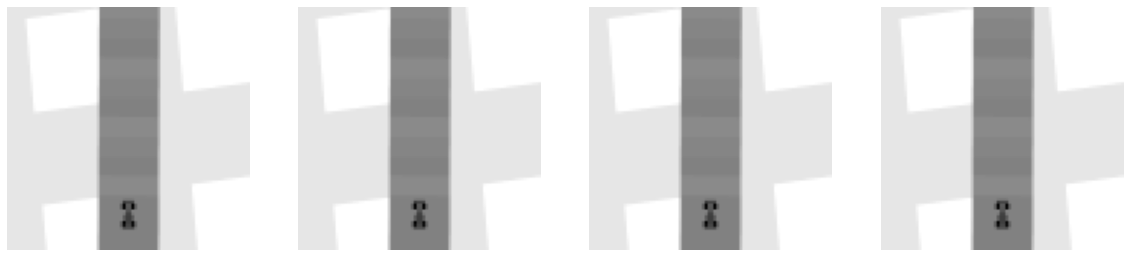
s, _ = env.reset()
print("The shape of an observation: ", s.shape)
fig, axes = plt.subplots(1, 4, figsize=(20, 5))
for i in range(4):
axes[i].imshow(s[i], cmap='gray')
axes[i].axis('off')
plt.show()
The shape of an observation: (4, 84, 84)
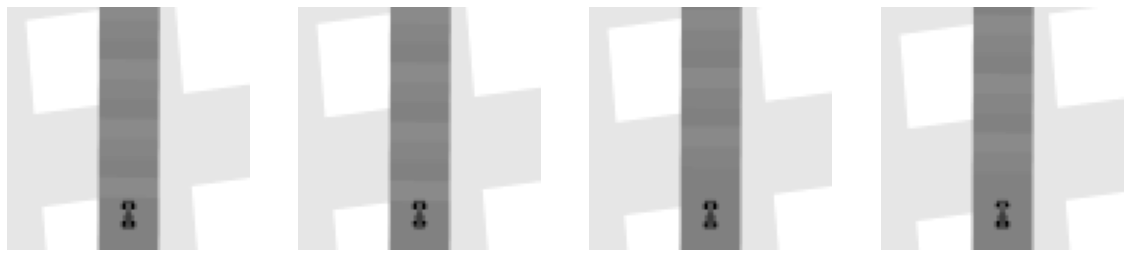
Let’s do gas action for the next 4 steps. You can see our car was moving forward!
(The position of the car does not seem to change, but it is actually moving forward. See background)
for i in range(4):
s, r, terminated, truncated, info = env.step(3) # 3rd action is `gas` action
fig, axes = plt.subplots(1, 4, figsize=(20, 5))
for i in range(4):
axes[i].imshow(s[i], cmap='gray')
axes[i].axis('off')
plt.show()
Q-network#
Let’s read together some part of DQN paper.
The input to the neural network consists is an 84 × 84 × 4 image produced by \(\phi\). The first hidden layer convolves 16 8 × 8 filters with stride 4 with the input image and applies a rectifier nonlinearity [10, 18]. The second hidden layer convolves 32 4 × 4 filters with stride 2, again followed by a rectifier nonlinearity. The final hidden layer is fully-connected and consists of 256 rectifier units. The output layer is a fullyconnected linear layer with a single output for each valid action
class CNNActionValue(nn.Module):
def __init__(self, state_dim, action_dim, activation=F.relu):
super(CNNActionValue, self).__init__()
self.conv1 = nn.Conv2d(state_dim, 16, kernel_size=8, stride=4) # [N, 4, 84, 84] -> [N, 16, 20, 20]
self.conv2 = nn.Conv2d(16, 32, kernel_size=4, stride=2) # [N, 16, 20, 20] -> [N, 32, 9, 9]
self.in_features = 32 * 9 * 9
self.fc1 = nn.Linear(self.in_features, 256)
self.fc2 = nn.Linear(256, action_dim)
self.activation = activation
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = x.view((-1, self.in_features))
x = self.fc1(x)
x = self.fc2(x)
return x
Replay buffer#
For implementation of replay buffer, the pre-creation of the required arrays is more efficient than the use of collections.queue.
I referenced TD3 official implementation.
class ReplayBuffer:
def __init__(self, state_dim, action_dim, max_size=int(1e5)):
self.s = np.zeros((max_size, *state_dim), dtype=np.float32)
self.a = np.zeros((max_size, *action_dim), dtype=np.int64)
self.r = np.zeros((max_size, 1), dtype=np.float32)
self.s_prime = np.zeros((max_size, *state_dim), dtype=np.float32)
self.terminated = np.zeros((max_size, 1), dtype=np.float32)
self.ptr = 0
self.size = 0
self.max_size = max_size
def update(self, s, a, r, s_prime, terminated):
self.s[self.ptr] = s
self.a[self.ptr] = a
self.r[self.ptr] = r
self.s_prime[self.ptr] = s_prime
self.terminated[self.ptr] = terminated
self.ptr = (self.ptr + 1) % self.max_size
self.size = min(self.size + 1, self.max_size)
def sample(self, batch_size):
ind = np.random.randint(0, self.size, batch_size)
return (
torch.FloatTensor(self.s[ind]),
torch.FloatTensor(self.a[ind]),
torch.FloatTensor(self.r[ind]),
torch.FloatTensor(self.s_prime[ind]),
torch.FloatTensor(self.terminated[ind]),
)
DQN#
DQN agent has four methods.
__init__() as usualact()takes as input one state of np.ndarray and output actions by following epsilon-greedy policy.process()method takes one transition as input and define what the agent do for each step.learn()method samples a mini-batch from replay buffer and train q-network
In the DQN paper, they used replay buffer of size 1,000,000 and it requires a huge amount of memory, which cannot be loaded on my tiny RAM. For epsilon greedy policy, they used the initial epsilon of 1.0 and linearly decrease it to 0.1 for the the first million steps, and fixed it at 0.1 after.
class DQN:
def __init__(
self,
state_dim,
action_dim,
lr=0.00025,
epsilon=1.0,
epsilon_min=0.1,
gamma=0.99,
batch_size=32,
warmup_steps=5000,
buffer_size=int(1e5),
target_update_interval=10000,
):
self.action_dim = action_dim
self.epsilon = epsilon
self.gamma = gamma
self.batch_size = batch_size
self.warmup_steps = warmup_steps
self.target_update_interval = target_update_interval
self.network = CNNActionValue(state_dim[0], action_dim)
self.target_network = CNNActionValue(state_dim[0], action_dim)
self.target_network.load_state_dict(self.network.state_dict())
self.optimizer = torch.optim.RMSprop(self.network.parameters(), lr)
self.buffer = ReplayBuffer(state_dim, (1, ), buffer_size)
self.device = torch.device('cuda' if torch.cuda.is_available else 'cpu')
self.network.to(self.device)
self.target_network.to(self.device)
self.total_steps = 0
self.epsilon_decay = (epsilon - epsilon_min) / 1e6
@torch.no_grad()
def act(self, x, training=True):
self.network.train(training)
if training and ((np.random.rand() < self.epsilon) or (self.total_steps < self.warmup_steps)):
a = np.random.randint(0, self.action_dim)
else:
x = torch.from_numpy(x).float().unsqueeze(0).to(self.device)
q = self.network(x)
a = torch.argmax(q).item()
return a
def learn(self):
s, a, r, s_prime, terminated = map(lambda x: x.to(self.device), self.buffer.sample(self.batch_size))
next_q = self.target_network(s_prime).detach()
td_target = r + (1. - terminated) * self.gamma * next_q.max(dim=1, keepdim=True).values
loss = F.mse_loss(self.network(s).gather(1, a.long()), td_target)
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
result = {
'total_steps': self.total_steps,
'value_loss': loss.item()
}
return result
def process(self, transition):
result = {}
self.total_steps += 1
self.buffer.update(*transition)
if self.total_steps > self.warmup_steps:
result = self.learn()
if self.total_steps % self.target_update_interval == 0:
self.target_network.load_state_dict(self.network.state_dict())
self.epsilon -= self.epsilon_decay
return result
Training DQN Agent#
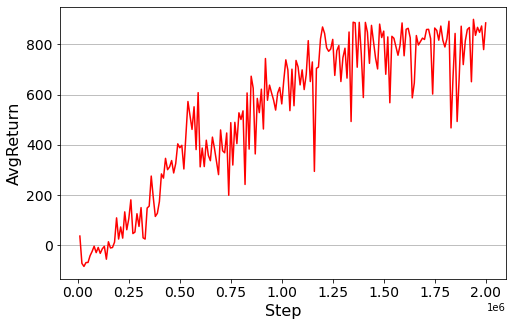
We will train DQN agent until the total number of interactions with the environment reaches 2 millilons and evaluate our agent evry 10,000 steps. The below codes will take a very long time.
env = gym.make('CarRacing-v2', continuous=False)
env = ImageEnv(env)
max_steps = int(2e6)
eval_interval = 10000
state_dim = (4, 84, 84)
action_dim = env.action_space.n
agent = DQN(state_dim, action_dim)
def evaluate(n_evals=5):
eval_env = gym.make('CarRacing-v2', continuous=False)
eval_env = ImageEnv(eval_env)
scores = 0
for i in range(n_evals):
(s, _), done, ret = eval_env.reset(), False, 0
while not done:
a = agent.act(s, training=False)
s_prime, r, terminated, truncated, info = eval_env.step(a)
s = s_prime
ret += r
done = terminated or truncated
scores += ret
return np.round(scores / n_evals, 4)
from IPython.display import clear_output
history = {'Step': [], 'AvgReturn': []}
(s, _) = env.reset()
while True:
a = agent.act(s)
s_prime, r, terminated, truncated, info = env.step(a)
result = agent.process((s, a, r, s_prime, terminated)) # You can track q-losses over training from `result` variable.
s = s_prime
if terminated or truncated:
s, _ = env.reset()
if agent.total_steps % eval_interval == 0:
ret = evaluate()
history['Step'].append(agent.total_steps)
history['AvgReturn'].append(ret)
clear_output()
plt.figure(figsize=(8, 5))
plt.plot(history['Step'], history['AvgReturn'], 'r-')
plt.xlabel('Step', fontsize=16)
plt.ylabel('AvgReturn', fontsize=16)
plt.xticks(fontsize=14)
plt.yticks(fontsize=14)
plt.grid(axis='y')
plt.show()
torch.save(agent.network.state_dict(), 'dqn.pt')
if agent.total_steps > max_steps:
break
Evaluation#
eval_env = gym.make('CarRacing-v2', continuous=False, render_mode='rgb_array')
eval_env = ImageEnv(eval_env)
frames = []
scores = 0
(s, _), done, ret = eval_env.reset(), False, 0
while not done:
frames.append(eval_env.render())
a = agent.act(s, training=False)
s_prime, r, terminated, truncated, info = eval_env.step(a)
s = s_prime
ret += r
done = terminated or truncated
scores += ret
def animate(imgs, video_name, _return=True):
import cv2
import os
import string
import random
if video_name is None:
video_name = ''.join(random.choice(string.ascii_letters) for i in range(18)) + '.webm'
height, width, layers = imgs[0].shape
fourcc = cv2.VideoWriter_fourcc(*'VP90')
video = cv2.VideoWriter(video_name, fourcc, 10, (width, height))
for img in imgs:
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
video.write(img)
video.release()
if _return:
from IPython.display import Video
return Video(video_name)
animate(frames)
