
3차원 원 적합(3d-circle fitting)
3차원 좌표공간에 원 모양의 데이터들이 주어졌을 때, 이 데이터에 가장 잘 맞는 원의 방정식은 어떻게 구할 수 있을까요?
만약 주어진 데이터들이 정확하게 한 원 위에 있다는 것을 안다면 단순하게 연립방정식을 푸는 것에 지나지 않을 것입니다.
하지만 현실 세계의 데이터는 관측 오차 등의 노이즈를 포함하고 있기 때문에 주어진 데이터들이 모두 한 원 위에 있기는 쉽지 않습니다.
그렇다면 우리는 현실과 타협하여 주어진 데이터들을 가장 잘 대표할 수 있는 원의 구하는 것으로 목표를 바꿔야할 것입니다.
이번 포스트에서는 3차원 좌표공간에 주어진 데이터들에 가장 적합한 원의 방정식을 찾는 것을 다뤄보도록 하겠습니다.
들어가기에 앞서 이 포스트는 참고문헌 1 을 참고하여 재구성한 포스트임을 미리 말씀드립니다.
(This post is a reproducing of the reference 1 in Korean. Some contents was added as needed )
포스트 소개
이번 포스트에서는 3차원 좌표 공간에 주어진 데이터들로부터 가장 적합한 원을 찾는 방법을 다룰 예정입니다. 다양한 방법이 있지만 우리는 다음 과정을 통해 가장 적합한 원을 찾아보도록 하겟습니다.
- 특이값분해(Singular value decomposition, SVD)를 통해 주어진 데이터에 가장 적합한 평면을 찾는다.
- 찾은 평면과 $xy$ 평면 사이의 각 $\theta$ 를 구해서 모든 데이터들을 $\theta$ 만큼 회전시켜주고 $xy$ 평면에 투영시킨다.
- 지난 포스트에서 다룬 2차원 원 적합을 적용하여 원의 중심과 반지름을 구해준다.
- 구한 원의 중심을 원래의 축 체계로 변환시킨다.
3차원 좌표공간에 있는 원의 방정식
2차원 좌표평면에 있는 원의 방정식을 $<rcos\theta,rsin\theta> + <x_0,y_0>$와 같이 매개변수 방정식으로 나타낼 수 있는 것처럼, 3차원 좌표공간에 있는 원의 방정식 또한 다음과 같이 나타낼 수 있습니다.
$\mathbf{P}_{\textbf{circle}}(\theta) = rcos\theta\mathbf{u} + rsin\theta(\mathbf{n}\times\mathbf{u})+\mathbf{C},\;0\le t \le 2\pi$
이 때, 원의 반지름은 $r$, 원의 중심은 $\mathbf{C}=(x_0,y_0,z_0)$, 단위법선벡터는 $\mathbf{n}$이며, $\mathbf{u}$는 $\mathbf{n}$과 수직한 아무 벡터일 수 있습니다.
위 매개변수 방정식은 2차원 좌표평면에 있는 원의 방정식과 비교하여 생각해보면 쉽게 이해할 수 있습니다. 먼저 2차원 좌표평면에 있는 원의 방정식을 다시 적어보면 다음과 같습니다.
$rcos\theta<1, 0> + rsin\theta <0, 1> + <x_0, y_0>$
이 때, $<1, 0>$는 $x$축을 나타내는 단위방향벡터이며 $<0, 1>$는 $y$축을 나타내는 단위방향벡터입니다. 이를 확장하여 $xy$ 평면 위에 있는 원을 3차원 좌표 공간에 나타내보겠습니다.
$rcos\theta<1, 0, 0> + rsin\theta <0, 1, 0> + <x_0, y_0, 0>$
3차원 좌표공간에서 $xy$ 평면의 법선벡터($\mathbf{n}$)는 $<0,0,1>$ 입니다. $x$축을 나타내는 방향벡터 $<1, 0, 0>$는 $\mathbf{n}$과 수직한 벡터입니다($\mathbf{u}$). 마지막으로 $y$축을 나타내는 방향벡터 $<0, 1, 0>$ 는 $\mathbf{n}$과 $\mathbf{u}$에 동시에 수직하는 벡터입니다 ($\mathbf{n}\times\mathbf{u}$).
이를 유념하면서 다시 3차원 원의 방정식을 보면 단순히 원이 이루는 평면의 법선벡터를 이용해서 새로운 축 $\mathbf{u}$과 $(\mathbf{n}\times\mathbf{u})$를 만들어서 표현한 것에 지나지 않는다는 것을 알 수 있습니다.
지금까지 3차원 좌표공간에 있는 원의 방정식을 표현하는 방법을 알아보았습니다. 우리는 나중에 이 방정식을 통해 데이터 포인트를 샘플링을 할 것입니다.
특이값분해를 이용한 평면 적합
우리에게 $n$개의 데이터가 주어졌다고 가정해봅시다. : $\mathbf{P}_1,\; \mathbf{P}_2,\; \cdots,\; \mathbf{P}_n\;\; \text{where}\;\; \mathbf{P}_i = (x_i, y_i, z_i)^T$. 우리는 이 데이터에 가장 적합한 평면을 찾는 것이 목표입니다. 가장 적합한 평면을 찾기 위해서 우리는 각각의 데이터와 평면 사이의 수직 거리를 구하고 이를 제곱하여 합하는 최소제곱법을 사용할 것입니다.
먼저 데이터 포인트들을 하나의 $n\times3$ 행렬 $A$로 나타낼 수 있습니다.
$A = (\mathbf{P}_0-\mathbf{c}, \mathbf{P}_1-\mathbf{c}, \cdots, \mathbf{P}_n-\mathbf{c})^T$
이 때, 편의를 위해서 각 데이터에서 데이터의 중심 ($\mathbf{c} = \frac{1}{n}\sum_i{\mathbf{P}_i}$) 을 빼주었습니다.(이렇게 평행이동한 데이터들의 중심은 원점이 됩니다.)
평행이동된 점($\mathbf{P}_i - \mathbf{c}$) 과 평면사이의 거리는 법선벡터와 내적의 정의를 사용하면 $(\mathbf{P}_i - \mathbf{c})^T\mathbf{n}$ 인 것을 알 수 있습니다(데이터를 평면에 수직한 법선벡터 $\mathbf{n}$ 에 투영한 것이 내적이므로). 그렇다면 $A\mathbf{n}$은 각 포인트에서 평면까지의 거리들을 나타내는 벡터가 되는 것이고. 각 포인트와 평면사이 거리의 제곱의 합은 벡터 $A\mathbf{n}$의 유클리디안 크기인 $\lVert A\mathbf{n} \rVert^2$이 될 것입니다. 우리는 $\lVert A\mathbf{n} \rVert^2$ 을 최소로 만들어주는 평면을 찾고 싶은 것이므로, 우리는 다음을 만족하는 $\mathbf{n}$을 찾아주어야 합니다.
$\mathbf{n} = \arg!\min_{\mathbf{n}\in \mathbb{R}^3 \atop |\mathbf{n}|=1} | \mathbf{A} \mathbf{n} |^2$
이를 만족하는 $\mathbf{n}$은 특이값분해(이하 SVD)를 통해 쉽게 구할 수 있습니다. SVD에 의해서 행렬 $A$는 다음과 같이 분해될 수 있습니다.
$A = U\Sigma V^T$
이 때, $U$는 $n \times n$ orthonormal 행렬, $V$는 $3 \times 3$ orthonormal 행렬이고 각각은 $A$의 columns space와 row space의 orthogonal basis 입니다. 그리고 $\Sigma$는 특이값 $\sigma_1 \ge \sigma_2 \ge \sigma_3 \ge 0$ 을 원소로 갖는 대각행렬입니다. SVD에 대한 더 자세한 설명은 새로운 포스트에서 다뤄보도록 하겠습니다. 참고로 SVD는 $A$와 같은 직사각행렬에 대해서도 존재합니다.
SVD를 이용하여 $| \mathbf{A} \mathbf{n} |^2$를 다음과 같이 다시 적어볼 수 있습니다.
$\begin{matrix} | A \mathbf{n} |^2 & = & A\mathbf{n} \cdot A\mathbf{n} \\ & = & (A\mathbf{n})^TA\mathbf{n} \\ & = & (U\Sigma V^T \mathbf{n})^TU\Sigma V^T\mathbf{n} \\ & = & \mathbf{n}^T V \Sigma U^T U\Sigma V^T\mathbf{n} \\ & = & \mathbf{n}^T V \Sigma \Sigma V^T\mathbf{n} \\ & = & (\Sigma V^T \mathbf{n})^T \Sigma V^T\mathbf{n} \\ & = & \Sigma V^T \mathbf{n} \cdots \Sigma V^T\mathbf{n} \\ & = & |\Sigma V^T \mathbf{n}|^2 \\ & = & (\sigma_1 b_1)^2 + (\sigma_2 b_2)^2 + (\sigma_3 b_3)^2 \\ \end{matrix}$
이 때, $\mathbf{b} = V^T\mathbf{n}$ 입니다. 그리고 $\sigma_3$가 가장 작기 때문에 우리는 $\mathbf{b} = (0,0,1)^T$ 를 선택해줌으로써 $| A \mathbf{n} |^2$를 최소로 만들어 줄 수 있습니다.(Lagrange 승수법과 singular value와 선형변환된 벡터 사이의 부등식을 통해 유도할 수 있습니다.)
따라서 우리는 $|A \mathbf{n} |^2$를 최소로 만들어주는 $\mathbf{n}$을 다음과 같이 구할 수 있습니다.
$\begin{matrix} V^T \mathbf{n} & = & \mathbf{b} \\ V V^T \mathbf{n} & = & V \mathbf{b} \\ \mathbf{n} & = & V \mathbf{b} \\ & = & V \left( \begin{smallmatrix} 0\\0\\1 \end{smallmatrix} \right) \\ & = & V(:,3) \end{matrix}$
즉, 법선벡터 $\mathbf{n}$을 $V$의 세 번 째 열 벡터로 선택함으로써 우리가 찾는 평면을 찾을 수 있습니다.
지금까지 주어진 데이터로부터 가장 적합한 평면을 SVD 를 통해 찾아보았습니다. 다음 단계는 찾은 평면의 법선벡터와 $xy$ 평면 사이의 각도를 구하고 데이터들을 모두 회전시켜주고 $xy$ 평면에 투영시켜주는 단계입니다.
벡터들의 축 회전 : Rodrigues rotation
위 단계에서 우리는 SVD를 사용하여 주어진 데이터들에 가장 적합한 평면을 찾아보았습니다. 다음으로 우리는 주어진 데이터는 잠시 잊고 평면 위에 있는 벡터를 $xy$ 평면으로 회전시키는 방법에 대해서 알아보겠습니다.이를 위해서 우리는 Rodrigues' rotation formula 를 사용할 것입니다.
Rodrigues' rotation formula 는 주어진 벡터 $P$ 를 특정한 축을 기준으로 $\theta$만큼 축 회전한 벡터 $P_{rot}$ 를 구하는 공식입니다. 이 때 축을 나타내는 단위벡터를 $k$ 라고 하면 Rodrigues' rotation formula 는 다음과 같습니다.
$P_{rot} = P cos\theta + (\mathbf{k} \times P) sin\theta + \mathbf{k} \; (\mathbf{k} \cdot P) (1 - cos\theta)$
Rodrigues' rotation formula 에 대해서는 다음 포스트에서 다루는 것으로 하고 일단은 받아들이고 진행하겠습니다. (유도는 어렵지 않기 때문에 궁금하신 분들께서는 참고문헌 3 을 참조시면 좋을 것 같습니다.) 우리의 경우 회전할 각 $\theta$는 구한 평면의 법선벡터 $\mathbf{n}$와 $xy$ 평면의 법선벡터 $(0,0,1)^T$ 의 각을 구하면 되고 회전 축은 그 둘의 외적을 사용하면 됩니다. $\mathbf{k} = \mathbf{n} \times (0,0,1)^T$
주어진 데이터들을 위에서 구한 $\theta$와 $\mathbf{k}$로 Rodrigues' rotation을 해준 다음 $z$ 좌표를 0으로 만들어주면 데이터들을 $xy$ 평면으로 프로젝션 시킨 것과 같습니다. 이 때, 회전 변환은 거리 정보는 유지해준채 회전하는 것이기 때문에 원이 그대로 유지될 수 있습니다.
지금까지 우리는 주어진 데이터들을 거리 정보는 유지한채 $xy$ 평면으로 프로젝션 시키는 방법을 알아보았습니다. 즉, 3차원 공간의 데이터들을 2차원 좌표평면에 프로젝션 시켰습니다. 우리는 이제 이전 포스트에서 알아본 2차원 원 적합 방법을 통해 원의 방정식을 구할 수 있습니다. 이렇게 구한 원의 방정식에서 원의 중심을 다시 Rodrigues' rotation formula 을 이용하여 3차원 좌표 공간으로 돌려놓으면 3차원 원 적합 문제는 해결될 수 있습니다.
마지막으로 지금까지의 과정을 파이썬 코드를 통해 어떻게 구현될 수 있는지 알아보도록 하겠습니다.
파이썬 코드 구현
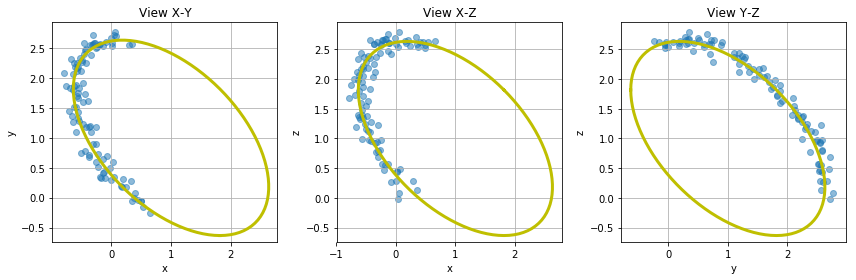
먼저 3차원 좌표 공간에 원을 만들어보도록 하겠습니다. 3차원 좌표공간에 있는 원의 방정식 에서 알아본 원의 방정식을 이용하도록 하겠습니다. 원의 중심은 $(1,1,1)$, 반지름 $r$ 은 2이고 법선벡터( $\mathbf{n}$ )는 $(\frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}}, \frac{1}{\sqrt{3}})$ 으로 설정하고 $\mathbf{n}$ 과 수직인 벡터 $\mathbf{u}$ 는 $(\frac{1}{\sqrt{6}}, \frac{-2}{\sqrt{6}}, \frac{1}{\sqrt{6}})$ 로 설정하겠습니다. 쉽게 생각하면 정육면체의 모서리에 접해 있는 원이라고 생각하시면 됩니다.
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
# 코드를 다시 실행해도 같은 노이즈를 선택하기 위해 시드를 설정합니다.
np.random.seed(1)
#----------------------------------------------------------
# 원 위의 점을 생성하는 함수
# P_circle(t) = r*cos(t)*u + r*sin(t)*(n x u) + C
#----------------------------------------------------------
def generate_circle_by_vectors(t, C, r, n, u):
n = n / np.linalg.norm(n)
u = u / np.linalg.norm(u)
P_circle = (r * np.cos(t)[:,np.newaxis] * u) + (r * np.sin(t)[:,np.newaxis] * np.cross(n,u)) + C
return P_circle
#----------------------------------------------------------
# 원 만들기
r = 2 # 반지름
C = np.array([1,1,1]) # 원의 중심
n = C / np.linalg.norm(C) # 법선 벡터
u = np.array([1, -2, 1]) # 법선벡터와 수직인 벡터
u = u / np.linalg.norm(u) #
t = np.linspace(0, 2*np.pi, 100)
P_gen = generate_circle_by_vectors(t, C, r, n, u)
#----------------------------------------------------------
#----------------------------------------------------------
# 원에서 데이터 샘플링하기
#----------------------------------------------------------
t = np.linspace(-np.pi, -0.25*np.pi, 100)
P = generate_circle_by_vectors(t, C, r, n, u)
# 샘플링한 데이터에 노이즈 추가하기
P += np.random.normal(size = P.shape) * 0.1
# 원과 샘플링된 데이터를 각 평면에 투영시킨 모습을 plot
f, ax = plt.subplots(1, 3, figsize = (12,4))
alpha_pts = 0.5
i = 0
ax[i].plot(P_gen[:, 0], P_gen[:, 1], 'y-', lw = 3, label = 'Generating circle')
ax[i].scatter(P[:, 0], P[:, 1], alpha = alpha_pts, label = 'Cluster points P')
ax[i].set_title("View X-Y")
ax[i].set_xlabel('x')
ax[i].set_ylabel('y')
ax[i].set_aspect('equal', 'datalim')
ax[i].margins(.1, .1)
ax[i].grid()
i = 1
ax[i].plot(P_gen[:, 0], P_gen[:, 2], 'y-', lw = 3, label = 'Generating circle')
ax[i].scatter(P[:, 0], P[:, 2], alpha = alpha_pts, label = 'Cluster points P')
ax[i].set_title("View X-Z")
ax[i].set_xlabel('x')
ax[i].set_ylabel('z')
ax[i].set_aspect('equal', 'datalim')
ax[i].margins(.1, .1)
ax[i].grid()
i = 2
ax[i].plot(P_gen[:, 1], P_gen[:, 2], 'y-', lw = 3, label = 'Generating circle')
ax[i].scatter(P[:, 1], P[:, 2], alpha = alpha_pts, label = 'Cluster points P')
ax[i].set_title("View Y-Z")
ax[i].set_xlabel('y')
ax[i].set_ylabel('z')
ax[i].set_aspect('equal', 'datalim')
ax[i].margins(.1, .1)
ax[i].grid()
f.tight_layout()
데이터는 만들었으니 이제 원 적합을 단계별로 진행해보도록 하겠습니다. 첫 단계는 SVD를 이용한 가장 적합한 평면 찾기 단계입니다.
우리는 먼저 1. 데이터 행렬 $P$를 만들고 2. A에서 데이터의 중심을 빼준 다음 3. $P$를 SVD를 하여 4. $V$ 행렬의 3번 째 컬럼을 적합된 평면의 법선벡터로 선택할 것입니다. 레츠고
# 1. 행렬 A 만들기, 이전 쉘에서 만든 P와 같습니다.
# 2. 데이터의 중심 구해서 빼기
P_mean = P.mean(axis = 0)
P_centered = P - P_mean
# 3. A를 SVD 하기
U, s, V = np.linalg.svd(P_centered)
# 4. 세 번 째 열을 법선벡터로 선택하기
normal = V[2, :] # np.linalg.svd 는 V 의 transpose를 반환해줍니다. 따라서 3번 째 행을 법선벡터로 선택해줍니다.
d = -np.dot(P_mean, normal)
print("The normal vector of fitted plane : ", n)
print("The groud truth normal vector : ", normal)
The normal vector of fitted plane : [0.57735027 0.57735027 0.57735027]
The groud truth normal vector : [-0.593907 -0.57179417 -0.56597341]
주어진 데이터에 가장 적합한 평면의 법선벡터를 찾았습니다. 원을 만들 때 정의한 법선벡터(n_gen)과 상당히 비슷한 것을 알 수 있습니다.
다음으로 법선벡터 $\mathbf{n}$과 $(0,0,1)^T$ 사이의 각도 $\theta$를 구하고 각 데이터들을 Rodrigues' rotation formula 사용해서 $xy$평면과 평행하게 회전하도록 하겠습니다. 각도는 “서로 다른 두 단위벡터 사이의 내적 값은 두 각이 이루는 각의 코사인 값과 같다.”를 생각하면 쉽게 구할 수 있습니다.
def rodrigues_rot(P, n0, n1):
# 만약 P가 1d 행렬이라면(점들의 집합), 메트릭스로 바꿔줍니다.
if P.ndim == 1:
P = P[np.newaxis, :]
# 회전축 벡터 k와 각도 theta 구하기
n0 = n0 / np.linalg.norm(n0)
n1 = n1 / np.linalg.norm(n1)
k = np.cross(n0, n1)
k = k / np.linalg.norm(k)
theta = np.arccos(np.dot(n0, n1))
# 회전된 데이터의 행렬 만들기
P_rot = np.zeros((len(P), 3))
for i in range(len(P)):
P_rot[i] = (P[i]*np.cos(theta)) + (np.cross(k, P[i])*np.sin(theta)) + (k*(1-np.cos(theta))*np.dot(k, P[i]))
return P_rot
P_xy = rodrigues_rot(P_centered, n, [0,0,1])
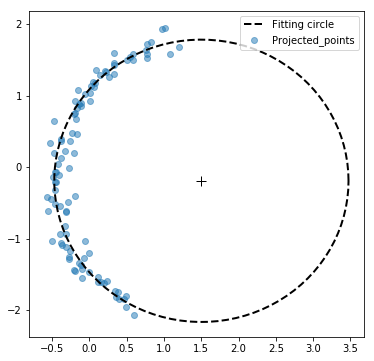
회전한 P_xy 데이터의 $x$축, $y$축 만을 사용하여 2차원 원적합을 하도록 하겠습니다.
def circle_fitting_2d(x, y):
A = np.array([np.ones(len(x)), x, y]).T
b = A[:, 1] ** 2 + A[:, 2] ** 2
c = np.linalg.inv(A.T.dot(A)).dot(A.T).dot(b)
xc = c[1] / 2
yc = c[2] / 2
r = np.sqrt(c[0] + xc ** 2 + yc ** 2)
return xc, yc, r
xc, yc, r = circle_fitting_2d(P_xy[:,0], P_xy[:,1])
# Fitting 된 원의 그리기
t = np.linspace(0, 2*np.pi, 100)
xx = xc + r * np.cos(t)
yy = yc + r * np.sin(t)
plt.figure(figsize = (6,6))
plt.plot(xx, yy, 'k--', lw = 2, label = 'Fitting circle')
plt.plot(xc, yc, 'k+', ms = 10)
plt.scatter(P_xy[:,0], P_xy[:,1], alpha = alpha_pts, label = 'Projected_points')
plt.legend(loc = 1)
plt.show()
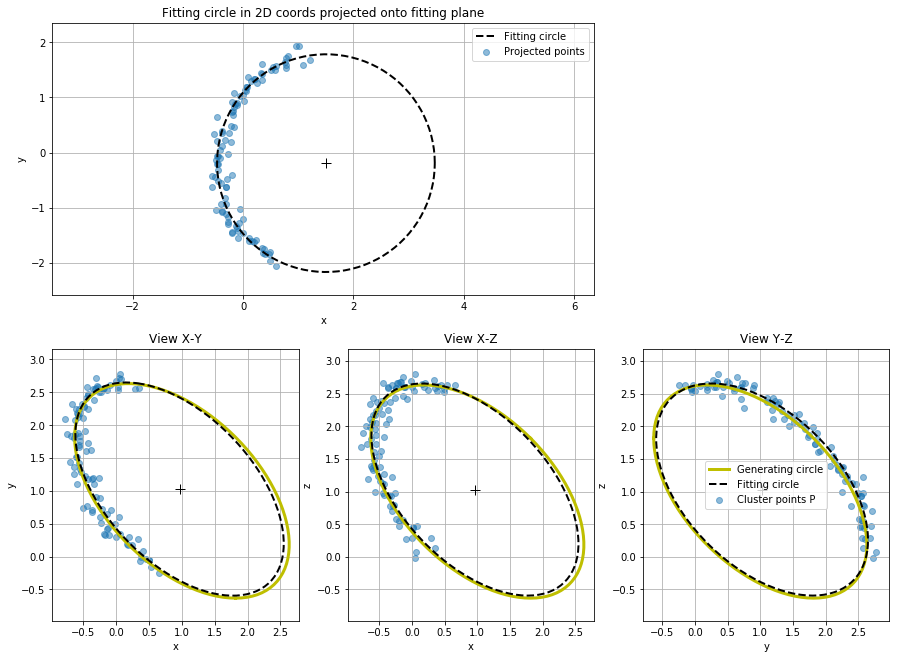
2차원에서 적합한 원의 중심과 반지름 알았으니 다시 원래의 평면으로 보내줍시다 !
# 피팅된 원의 센터를 다시 원래 평면으로 보내기
C = rodrigues_rot(np.array([xc, yc, 0]), [0,0,1], n) + P_mean
C = C.flatten()
#-------------------------------------------------------------------------------
# Init figures
#-------------------------------------------------------------------------------
fig = plt.figure(figsize=(15,11))
alpha_pts = 0.5
figshape = (2,3)
ax = [None]*4
ax[0] = plt.subplot2grid(figshape, loc=(0,0), colspan=2)
ax[1] = plt.subplot2grid(figshape, loc=(1,0))
ax[2] = plt.subplot2grid(figshape, loc=(1,1))
ax[3] = plt.subplot2grid(figshape, loc=(1,2))
i = 0
ax[i].set_title('Fitting circle in 2D coords projected onto fitting plane')
ax[i].set_xlabel('x'); ax[i].set_ylabel('y');
ax[i].set_aspect('equal', 'datalim'); ax[i].margins(.1, .1); ax[i].grid()
i = 1
ax[i].plot(P_gen[:,0], P_gen[:,1], 'y-', lw=3, label='Generating circle')
ax[i].scatter(P[:,0], P[:,1], alpha=alpha_pts, label='Cluster points P')
ax[i].set_title('View X-Y')
ax[i].set_xlabel('x'); ax[i].set_ylabel('y');
ax[i].set_aspect('equal', 'datalim'); ax[i].margins(.1, .1); ax[i].grid()
i = 2
ax[i].plot(P_gen[:,0], P_gen[:,2], 'y-', lw=3, label='Generating circle')
ax[i].scatter(P[:,0], P[:,2], alpha=alpha_pts, label='Cluster points P')
ax[i].set_title('View X-Z')
ax[i].set_xlabel('x'); ax[i].set_ylabel('z');
ax[i].set_aspect('equal', 'datalim'); ax[i].margins(.1, .1); ax[i].grid()
i = 3
ax[i].plot(P_gen[:,1], P_gen[:,2], 'y-', lw=3, label='Generating circle')
ax[i].scatter(P[:,1], P[:,2], alpha=alpha_pts, label='Cluster points P')
ax[i].set_title('View Y-Z')
ax[i].set_xlabel('y'); ax[i].set_ylabel('z');
ax[i].set_aspect('equal', 'datalim'); ax[i].margins(.1, .1); ax[i].grid()
ax[0].scatter(P_xy[:,0], P_xy[:,1], alpha=alpha_pts, label='Projected points')
ax[0].plot(xx, yy, 'k--', lw=2, label='Fitting circle')
ax[0].plot(xc, yc, 'k+', ms=10)
ax[0].legend()
t = np.linspace(0, 2*np.pi, 100)
u = P[0] - C
P_fitcircle = generate_circle_by_vectors(t, C, r, normal, u)
ax[1].plot(P_fitcircle[:,0], P_fitcircle[:,1], 'k--', lw=2, label='Fitting circle')
ax[2].plot(P_fitcircle[:,0], P_fitcircle[:,2], 'k--', lw=2, label='Fitting circle')
ax[3].plot(P_fitcircle[:,1], P_fitcircle[:,2], 'k--', lw=2, label='Fitting circle')
ax[3].legend()
ax[1].plot(C[0], C[1], 'k+', ms=10)
ax[2].plot(C[0], C[2], 'k+', ms=10)
ax[3].plot(C[1], C[2], 'k+', ms=10)
ax[3].legend()
<matplotlib.legend.Legend at 0x28fb12e7f98>
마지막으로 3차원으로 결과를 확인해보도록 하겠습니다.
%matplotlib qt
fig = plt.figure(figsize=(15,15))
ax = fig.add_subplot(1,1,1,projection='3d')
ax.plot(*P_gen.T, color='y', lw=3, label='Generating circle')
ax.plot(*P.T, ls='', marker='o', alpha=0.5, label='Cluster points P')
#--- Plot fitting plane
xx, yy = np.meshgrid(np.linspace(-1,3,11), np.linspace(-1,3,11))
zz = (-normal[0]*xx - normal[1]*yy - d) / normal[2]
ax.plot_surface(xx, yy, zz, rstride=2, cstride=2, color='y' ,alpha=0.2, shade=False)
#--- Plot fitting circle
ax.plot(*P_fitcircle.T, color='k', ls='--', lw=2, label='Fitting circle')
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
ax.set_xlim(-1,3)
ax.set_ylim(-1,3)
ax.set_zlim(-1,3)
ax.legend()
# ax.set_aspect('equal', 'datalim')
# fig.set_axes_equal_3d(ax)
plt.show()

참고 문헌
[1] : FITTING A CIRCLE TO CLUSTER OF 3D POINTS
[2] : Singular Value Decomposition
[3] : Rodrigues’ rotation formula
